Evaluation of Kinect Accuracy for Rehabilitation Interfaces
 There has been increasing interest in the use of commercially available game controllers, such as Microsoft Kinect, as an interface for home-based rehabilitation protocols involving game-like movement exercise tasks for stroke survivors. With the benefits of making therapy financially accessible and allowing doctors the ability to remotely monitor patient progress this new technology has the potential to revolutionize stroke rehabilitation. A critical validation step for these applications, though, is an experimental evaluation of the accuracy and latency of the motion capture data obtained from Kinect in comparison with a research grade motion capture device. In this project, we aim to fill this gap by quantifying fundamental specifications of Kinect as a real-time motion capture interface.
There has been increasing interest in the use of commercially available game controllers, such as Microsoft Kinect, as an interface for home-based rehabilitation protocols involving game-like movement exercise tasks for stroke survivors. With the benefits of making therapy financially accessible and allowing doctors the ability to remotely monitor patient progress this new technology has the potential to revolutionize stroke rehabilitation. A critical validation step for these applications, though, is an experimental evaluation of the accuracy and latency of the motion capture data obtained from Kinect in comparison with a research grade motion capture device. In this project, we aim to fill this gap by quantifying fundamental specifications of Kinect as a real-time motion capture interface.
Haptic Paddle
 Haptic paddles are single degree-of-freedom force-feedback interfaces used in lab components of system dynamics, robotics, control systems or haptics courses. The original haptic paddle was designed at Stanford University and since then several variations were developed and used at Rice University, Johns Hopkins University, University of Utah and Vanderbilt University, among others. We are developing the SFSU haptic paddle, which will be used in Mechatronics Lab and Control Systems Lab courses at SFSU. Our design focuses on minimizing the amount of required machining, a robust transmission design that allows speed control (unlimited rotations) in addition to position and impedance control modes and Arduino-based affordable data acquisition and control interface, to significantly lower the cost and increase ease of adoption at other institutions.
Haptic paddles are single degree-of-freedom force-feedback interfaces used in lab components of system dynamics, robotics, control systems or haptics courses. The original haptic paddle was designed at Stanford University and since then several variations were developed and used at Rice University, Johns Hopkins University, University of Utah and Vanderbilt University, among others. We are developing the SFSU haptic paddle, which will be used in Mechatronics Lab and Control Systems Lab courses at SFSU. Our design focuses on minimizing the amount of required machining, a robust transmission design that allows speed control (unlimited rotations) in addition to position and impedance control modes and Arduino-based affordable data acquisition and control interface, to significantly lower the cost and increase ease of adoption at other institutions.
For more information see the following: Instructions for Manufacturing and Instructions for Assembly
Haptic Tunable Impedance Prosthesis
 The project consists of design and implementation of a haptic tunable impedance upper extremity prosthesis. The main objective is to achieve complete flexibility in adjusting the relationship between the grip force generated at the prehensor based on subject’s contralateral shoulder movement, which is lacking in current body-powered prostheses. Such flexibility will allow optimization of body-powered prosthetic device impedance and sensitivity parameters via human subject experiments. There will be two motors used in teleoperation mode, for which the sensitivities, base cable tensions, simulated spring stiffness and damping values will remain easily adjustable via control software. Once the controller is implemented, testing and evaluation of the device will be conducted to quantify device specifications and to satisfy intuitive usability requirements.
The project consists of design and implementation of a haptic tunable impedance upper extremity prosthesis. The main objective is to achieve complete flexibility in adjusting the relationship between the grip force generated at the prehensor based on subject’s contralateral shoulder movement, which is lacking in current body-powered prostheses. Such flexibility will allow optimization of body-powered prosthetic device impedance and sensitivity parameters via human subject experiments. There will be two motors used in teleoperation mode, for which the sensitivities, base cable tensions, simulated spring stiffness and damping values will remain easily adjustable via control software. Once the controller is implemented, testing and evaluation of the device will be conducted to quantify device specifications and to satisfy intuitive usability requirements.
Wrist Gimbal: Forearm and Wrist Exoskeleton
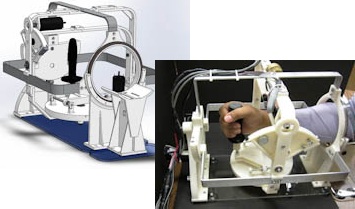 In this project, we have designed and built a desktop exoskeleton robot for rehabilitation of stroke or spinal cord injury patients, as well as for motor learning and adaptation research. Wrist Gimbal has three active DOF, corresponding to pronation/supination, flexion/extension and adduction/abduction joints. We mainly focused on a robust, safe and practical device design to facilitate clinical implementation, testing and acceptance. An arm rest with padding and straps, a handle with adjustable distal distance and height and a large inner volume contribute to ease of use and of axis alignment.The data acquisition and control is implemented via Quanser hardware and QuaRC with Matlab/Simulink. We are currently working on development of visual interfaces for physical therapy and error augmentation.
In this project, we have designed and built a desktop exoskeleton robot for rehabilitation of stroke or spinal cord injury patients, as well as for motor learning and adaptation research. Wrist Gimbal has three active DOF, corresponding to pronation/supination, flexion/extension and adduction/abduction joints. We mainly focused on a robust, safe and practical device design to facilitate clinical implementation, testing and acceptance. An arm rest with padding and straps, a handle with adjustable distal distance and height and a large inner volume contribute to ease of use and of axis alignment.The data acquisition and control is implemented via Quanser hardware and QuaRC with Matlab/Simulink. We are currently working on development of visual interfaces for physical therapy and error augmentation.
Velocity Estimation
 In haptic interfaces and robotic systems, velocity values needed in control algorithm implementation are most commonly estimated from position measurements based on optical encoder readings, via use of finite difference method (FDM) and a cascaded low-pass filter. Although this method leads to acceptable velocity estimations in most cases, the estimation accuracy deteriorates due to delay introduced by the filter and loss of resolution in high loop rates. Our goal in this project is to develop methods for velocity estimation with improved accuracy and delay characteristics.
In haptic interfaces and robotic systems, velocity values needed in control algorithm implementation are most commonly estimated from position measurements based on optical encoder readings, via use of finite difference method (FDM) and a cascaded low-pass filter. Although this method leads to acceptable velocity estimations in most cases, the estimation accuracy deteriorates due to delay introduced by the filter and loss of resolution in high loop rates. Our goal in this project is to develop methods for velocity estimation with improved accuracy and delay characteristics.

